
- By Gary Frigyes, Ed Myers, Jeff Allison
- February 05, 2013
- Pepperl + Fuchs GmbH
- News
Summary
-
When using photoelectric sensors in simple diffused mode (a.k.a. proximity mode), the sensor uses the target to reflect light back to itself, eliminating the need for a secondary device such as a reflector.

Introduction to Diffused Mode Sensing
When using photoelectric sensors in simple diffused mode (a.k.a. proximity mode), the sensor uses the target to reflect light back to itself, eliminating the need for a secondary device such as a reflector.
But the ability to precisely control the sensing range is not possible even if the sensor offers a sensitivity adjustment. In many applications this can cause significant problems because shiny objects well beyond the sensor¡¦s specified sensing range are erroneously detected. In fact it is not uncommon for a standard diffused mode sensor with a specified range of 15 inches to falsely detect a piece of metal, Plexiglas or other highly reflective object that is 6 feet or farther away from the sensor.
Targets can vary greatly in color and this will directly affect the range of the sensor. This varying sensing distance is known as black-white differential. The black-white differential is simply the difference in distance between where a diffused sensor detects a 90% reflective white card vs. a 6% reflective black test card under the same conditions. Sensor manufacturers normally provide black-white differential data in the form of a graph so that customers have a guideline when applying them to the application. Figure 1 below shows a typical black-white differential graph for a standard diffused mode sensor.
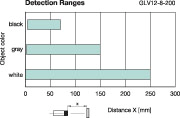
Fig. 1
As seen in Figure 1, color significantly affects sensing range for a diffused mode sensor, as the black-white differential for the sensor is approximately 190mm. The dramatic reduction in sensing range is due to the fact that standard diffused sensors recognize a target based on the light reflected back to the sensor¡¦s receiver. The received light must be strong enough to overcome any ambient light or any electrical noise at the sensor¡¦s receiver. If the target is black, it absorbs large amounts of energy and therefore must be close to the sensor in order to return enough of the emitted light to be detected.
The Background Suppression Solution
A special type of diffused mode sensing, referred to as background suppression, enables users to precisely control sensing range. And while a fixed and controllable sensing range is one of the biggest advantages of background suppression sensors, the technology brings a lot more to the table than that.
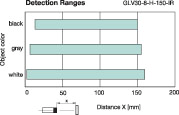
Fig. 2
As shown in Figure 2, diffused mode with background suppression is far less sensitive to target color. For this sensor, the sensing range is almost identical for black and white targets with a black-white differential of only 10mm - far less than the 190mm seen in the standard diffused sensor from figure 1.
Diffused mode sensors with background suppression can use either visible red or infrared (IR) light sources. The sensor depicted in Figure 2 shows the black-white differential for a sensor with an infrared light source. The obvious benefit of visible red is that alignment from the photoelectric sensor to the target is simplified. Using an IR light source eliminates this visual aid, but its advantages lie in its higher power and superior color insensitivity. As infrared is more efficient than visible red and can be driven by larger current pulses, it has a higher optical power output and can operate at longer sensing ranges. Background suppression photoelectric sensors with IR sources have smaller black-white differentials compared to similar sensors with visible red sources.
Background suppression also provides a very small, bright and clearly defined light spot to give the user a high level of precision and repeatability, as well as the ability to detect small objects with the same reflective properties as the background (i.e. verifying that a piston ring has been placed in the groove of a piston). If the background suppression sensor selected has a visible red light source, the brightness of the light spot is helpful as an alignment aid.

Fig. 3
The basic principal behind background suppression is triangulation. An LED transmits light through a lens in a straight line toward the target. The target reflects light back to the receivers (E1 and E2 in figure 3) at some angle. The distance between the sensor and target determines the angle in which light is reflected back to the receiver. The closer the target is to the sensor, the greater the angle of reflection. As seen in Figure 3, ć > ć1 causes the light to be directed to receiver element E1. As the target moves away and the angle decreases, the light is directed to receiver element E2. Depending on which element is receiving light, the sensor differentiates between a target and the background. This is based on the distance from the sensor, not on the amount of received light.
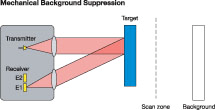
Fig. 4
Diffused mode sensors with background suppression can operate at a fixed or at a variable range and can be accomplished either mechanically or electronically. Cost is one of the main reasons why two methods exist to accomplish background suppression, but there are also size and performance tradeoffs.
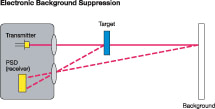
Fig. 5
Mechanical background suppression offers better optical performance and a sharper cutoff range. Mechanical background suppression is inherently more stable through temperature change, however electronic BGS has a clear advantage in heavy vibration applications. There are also definite size limitations with background suppression technology. With mechanical background suppression, the sensor needs two receiving elements and an adjustable lens. This requires more real estate within the sensor to house the additional receiving element along with the mechanism to adjust the sensor¡¦s lens. Therefore, mechanical background suppression sensors are usually housed in larger rectangular housings. To accomplish background suppression technology in miniature housings, electronic background suppression needs to be utilized. Electronic background suppression is accomplished by using a Position Sensitive Device (PSD), which gives an output corresponding to where light strikes it, in lieu of mechanical parts.
Application Considerations
Although background suppression brings many advantages to photoelectric sensing, there are some challenges to consider, most all of which can be accounted for with forethought and planning.
These sensors generally offer shorter sensing ranges than standard diffused sensors primarily due to their precise and controllable sensing range. They also require a minimum sensing distance. (See Figure 6.) If a target is too close to the lens, the angle of the transmitter light reflected from the target doesn¡¦t allow the light to reach the receiver. The minimum sensing range is typically under 10% of the full range of the sensor.
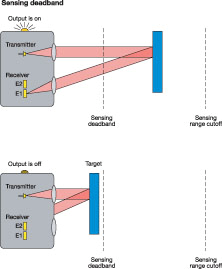
Fig. 6
For sensors that operate at a fixed sensing range, mounting and positioning must be considered for new applications. Because they have no sensitivity adjustments, fixed range photoelectric sensors offer tamper-proof sensing. However, when mounting fixed range units, a flexible mounting system may be necessary to ¡§fine-tune¡¨ the sensor¡¦s distance and angle to the target for proper detection. Fixed background suppression is more difficult to install, but because of the lack of mechanical parts, lower overall cost can be achieved. An alternative to this is using an adjustable range background suppression photoelectric sensor, in which an external potentiometer allows for these adjustments.
When a target with two contrasting colors, such as black and white, is positioned at the sensing range cut-off, the more reflective side of the target can reflect more light back to the far receiver than it does to the near receiver. As this border of the target passes through the light beam, the sensor output can turn OFF momentarily. This is referred to as the Pepita effect, (see Figure 7). It can happen if a sensor¡¦s light spot is simultaneously on two contrasting colors or surfaces at the cut-off distance and if the sensor is not properly oriented with respect to the black-white border, and can also be seen with extreme variation in reflectivity or contour of a target. The fix for the Pepita effect involves either rotating the sensor 90 degrees so that the sensing axis is aligned horizontally instead of vertically, or moving the sensor closer to the target.

Fig. 7
Another peculiar phenomenon is the cross-eyed effect (See Figure 8). When a specified target is smaller than the background suppression sensor¡¦s LED light spot, the target is unable to block the sensor¡¦s light beam. The majority of the light energy passes around the target and hits the background surface. Therefore, most of the light is reflected off the background back to the sensor, which causes the sensor to believe there is no target present. To prevent this effect, users should specify a background suppression sensor with a light spot diameter that is smaller than the target.
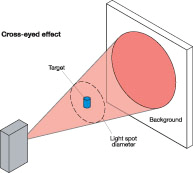
Fig. 8
The blinding effect is a final challenge (See Figure 9.) that occurs when too much light is reflected back to the sensor. As a result, the sensor cannot be properly adjusted between the near and far distances. This can happen when a background suppression sensor is aimed at a reflector, a mirror, or is perpendicular to a very shiny object. To remedy this problem, the sensor should be angled slightly (~5 degrees) so it is not perpendicular to the target/background. This will cause less light to be reflected back to the sensor and not overwhelm the photoreceivers.
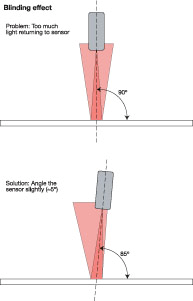
Fig. 9
Sidebar
A packaging manufacturer was faced with a challenge. They wanted a device that not only detects all shades of black without error but also offers an extended sensing range of at least four feet. Due to a wide variety of package sizes, they were using magnetic sensors on their top sheet wrapper and had to adjust the magnet placement every time the load size changed. In addition to the downtime from the changeover, the process wasn¡¦t always precise.
To solve the problem, the existing sensors needed to be replaced with something that can reliably detect flat black and glossy black materials. But a common problem with photoelectric sensors is that dark colors absorb more light than they reflect, which potentially shortens the sensing range.

The company selected Pepperl+Fuchs¡¦ Series 28 photoelectric sensor with background suppression and an infrared light source. The background suppression sensor is a diffused mode photoelectric that uses separate sensing elements to detect objects close together without detecting the background material. Its sensing range for black is just 5% less than its range for white targets, and it can operate at a variable distance. The sensor was installed on the yellow carriage of the top-loading machine and senses the contours of the package to enable the machine to automatically wrap any size package. Highly visible LEDs offer visual status indication from as far away as 50 feet.
The variable range feature makes the Series 28 sensors effective on a variety of applications. The ability to define the sensing range is particularly useful on rotary tower systems (Figure 2), which feature a carriage that rotates around the package. When the sensing range is adjusted to the width of the conveyor, the sensor ignores everything beyond the conveyor belt.
For more information:
www.am.pepperl-fuchs.com
[email protected]
Ph: 330-486-0001
About The Author
Gary Frigyes, Ed Myers, and Jeff Allison are product managers for Pepperl+Fuchs
Did you enjoy this great article?
Check out our free e-newsletters to read more great articles..
Subscribe