



Manufacturing robotics—as often depicted in “how it is made” videos, commercials and movies—represent a dramatically fast and accurate technology for improving throughput and quality. After working over a decade on industrial and automation projects, I was very familiar with using my engineering skills to integrate robotics and automation for mechanical systems. While this experience was primarily in the utility and automotive industries, my background led me to consider how robotics and automation technologies could be deployed in consumer-facing industries. In this arena, Asia is far ahead of the rest of the world. For example, Japan uses many types of robots for preparing, cooking, and serving food to guests.
Elsewhere in the world, food service robotics are gaining a lot of interest and hype, but a common problem is that developers are working on solutions that are far too complex and expensive for typical commercial use. With these ideas in mind, I set out to create an automated beverage dispensing platform suitable for all types of hospitality venues, and specifically for pouring beer. However, for this project to make sense, all aspects of the automation would need to be value-engineered so that the result would be easy-to-use, highly efficient, and cost-effective.
Recipe for success
Just as any good bartender becomes familiar with their patrons, I made sure to perform some research first to find out what owners and users would want and need in a dispensing robot. After completing my research in this area, I supported some of the technical design with simulation before jumping in too deep. Virtual studies accomplished by bringing CAD models into the robot development environment allowed close estimation of the arm reach, cycle times, and optimal subsystem placements. A dispenser would need to be mobile and easily moved on wheels, but robust enough to withstand normal handling and transport (Figure 1). It would need to use common power and communication interfaces, and work with typical beverage supplies.
In fact, to minimize costs and simplify support, it was important to use commercial off-the-shelf (COTS) components and software to the greatest extent possible.  Automation would be required to play a key role for efficiency, and to provide a high-tech presentation aspect. However, the goal would be to incorporate just enough signals and sensors to perform the necessary tasks and be supportable, without going overboard and increasing costs. The same could be said for the control platform, where it was desirable to combine as much functionality into as few controllers as possible. It became clear that many different digital operations required orchestration:
Automation would be required to play a key role for efficiency, and to provide a high-tech presentation aspect. However, the goal would be to incorporate just enough signals and sensors to perform the necessary tasks and be supportable, without going overboard and increasing costs. The same could be said for the control platform, where it was desirable to combine as much functionality into as few controllers as possible. It became clear that many different digital operations required orchestration:
- Robot pouring arm control
- Control of cup handling devices
- API connectivity for point-of-sale systems
- Socket messaging to external systems
- Visualization of menus, branding, and queuing functions
Therefore, the design started with a search for commercial robots with sufficient built-in controller capabilities to perform the equipment functions, so that only one separate Raspberry Pi controller and an associated display would be needed for all required additional computing tasks.
A reliable pour
Mechanical design was primarily focused on creating a mobile form factor for the robotic arm, cup dispensing mechanisms, and pouring hardware. Portability was a key factor, requiring careful design so the electrical connections, fittings, and automation devices would be sufficiently robust to avoid intermittent issues or other complete failures. This was especially important because the field personnel working with the dispenser would not have the technical expertise to perform troubleshooting. Space optimization in the control cabinet design was also important, and fortunately the design team was familiar with using several CAD and modelling tools (Figure 2) . Slim interface relays and double-level, feed-through terminal blocks were selected to provide high-density connections.
Color coding was applied to different groups of signals for easier assembly and maintenance. The team found that the consistency and availability of CAD files from our supplier AutomationDirect was great for maximizing the speed and accuracy of the design process because the source information was clear and available in one easily accessed location.  Based on previous design experience, the team knew they could trust the performance, quality, availability, and value of AutomationDirect products. Therefore, they selected circuit breakers, relays, terminal blocks, power supplies, and more from their portfolio (Figure 3).
Based on previous design experience, the team knew they could trust the performance, quality, availability, and value of AutomationDirect products. Therefore, they selected circuit breakers, relays, terminal blocks, power supplies, and more from their portfolio (Figure 3).  Many OEMs and systems integrators today are struggling with limited product availability and other supply chain issues for automation components.
Many OEMs and systems integrators today are struggling with limited product availability and other supply chain issues for automation components.
Hop Robotics appreciated working with a supplier having a depth of product brands, along with their own line of products. This provides more options and simplifies the search for components. Furthermore, OEMs, startups, and end users alike can smooth over a lot of bumps in the road by using a reliable supplier, so they have one less thing to worry about. The resulting design has proceeded through a first and second generation (Figure 4) . The equipment is impressive in appearance and operation, pouring beer accurately and rapidly with the optimal dispensing rate and foam head.
The design allows for remote ordering and self-serve after ID and payment, and it is easy to move either onsite or between venues. 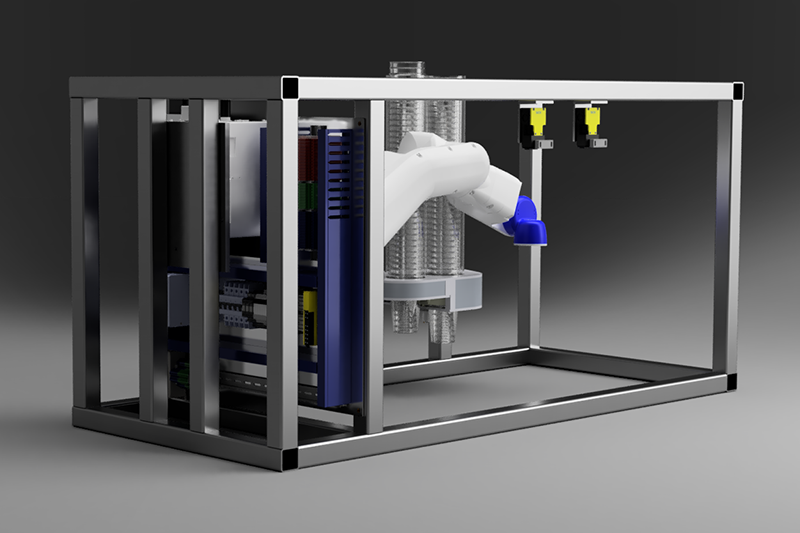
 Trial operation has proven the equipment to be reliable in service. Hop Robotics has used the right amount of technology to create a design that will outlast novelty concepts, with a focus on required functionality, a small footprint, and low cost. All figures courtesy of Hop Robotics
Trial operation has proven the equipment to be reliable in service. Hop Robotics has used the right amount of technology to create a design that will outlast novelty concepts, with a focus on required functionality, a small footprint, and low cost. All figures courtesy of Hop Robotics
