Rotary encoders: a key to motion control
Rotary encoders have been key components in motion and position control systems since the earliest days of digital controls, translating rotary motion into digital feedback signals for control systems. Standalone encoders are self-contained devices with their own housings and shafts, bearings and seals. They are available in a wide range of mechanical configurations and can be installed virtually anywhere in a machine where rotary motions need to be monitored.  An alternative approach is to use servomotors or feedbackcontrolled stepper motors that combine propulsion and position feedback into a single unit.
An alternative approach is to use servomotors or feedbackcontrolled stepper motors that combine propulsion and position feedback into a single unit.
In this case, integrated motor feedback is provided by a ”kit” or modular encoder mounted inside or immediately adjacent to a motor’s housing, with rotary motions measured directly from the drive shaft. This can be an efficient solution for industrial motion control systems powered by electric motors, as it reduces the need for separate position transducers. Let’s talk about the relative advantages of these two types of encoders.
Standalone encoder versatility
Standalone encoders are an excellent solution for machines that use non-electric prime movers like pneumatics or hydraulics. Because standalone devices can be installed close to the operational end of the machinery—not just on a motor—they can avoid loss of positional accuracy that might occur when a motor’s power is transmitted through long gear trains, belts, or other mechanisms. Standalone encoders can also be used with a draw-wire assembly or measurement wheel to provide linear motion measurements. With many different mechanical configurations and communications interfaces available, designers are almost certain to be able to find devices that meet their requirements.
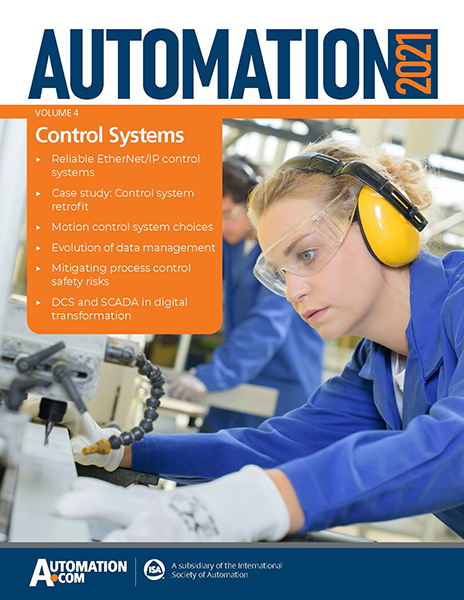
For example, for harsh environments, standalone encoders are available with heavyduty housings and seals that provide ingress protection ratings of up to IP69k. These units are protected against dust, water, and even the aggressive cleaning solutions and high-pressure jets used in pressure washing systems for food or pharmaceutical processing equipment. Integrated motor feedback encoder simplicity In contrast with standalone encoders, which are packaged as selfcontained units, ”kit” or modular encoders are designed to be built into—or attached to—a motor’s housing, measuring rotary motion directly from the motor’s drive shaft.
Integrating the position feedback encoder with the motor eliminates the need for a separate encoder shaft, bearing, and seal so that kit encoders for integrated motor feedback can be more compact and less expensive than their standalone counterparts. This arrangement also reduces the number of separate components in the machine.  A servomotor is typically a brushless dc (BLDC) motor that has a built-in encoder for position feedback. Here, feedback serves two purposes: to monitor the rotary position of the motor’s shaft and to provide a commutation signal to control the current flowing to the motor’s stator windings. Kit encoders can also be used with stepper motors, providing closed loop position feedback.
A servomotor is typically a brushless dc (BLDC) motor that has a built-in encoder for position feedback. Here, feedback serves two purposes: to monitor the rotary position of the motor’s shaft and to provide a commutation signal to control the current flowing to the motor’s stator windings. Kit encoders can also be used with stepper motors, providing closed loop position feedback.
This improves accuracy by eliminating positioning errors due to skipped steps. (This can become a significant problem at higher speeds when the torque output from stepper motors is reduced and the likelihood of missed steps increases.) A big attraction of stepper motors is their relatively low cost, especially when compared to highend servomotors. Inexpensive optical incremental encoders can improve positioning accuracy by verifying a step motion has been completed. For more demanding position control applications, cost-effective multiturn magnetic absolute encoders can be a better choice since these provide the controller with a complete picture of the rotary position of the motor’s shaft, including the number of rotations that have been completed.
Measurement technologies
Several different measurement technologies are used for encoders—both standalone and kit. (Manufacturers sometimes offer the same measurement components in both their standalone and kit encoders. In this case, kit or modular products are, in effect, unbundled versions of the standalone designs.) Optical encoders: are available in a range of configurations and performance levels.
At the high end, precision absolute optical measurement systems can have accuracies of +/- 0.02 degree and excellent dynamic response. These are suitable for advanced servomotors and precision position control applications At the other end of the price/performance scale, low-cost incremental encoders based on optical measurement technology are available. While these have lower precision, they can provide feedback for inexpensive stepper motors. While optical encoders can offer excellent accuracy, their internal components are vulnerable to contamination from dust, oil, and condensation.
As well, to achieve maximum accuracy, code disks and photoreceptor arrays must be aligned very precisely, making these units vulnerable to shock and vibration. Magnetic encoders: feature a small permanent magnet attached to the rotating shaft. The magnetic field from this is measured by an array of Hall effect sensors whose output is processed and filtered by software running on a tiny microprocessor built into the device. The result is good resolution and dynamic response in rugged, compact (as small as 22 mm diameter) units. Magnetic encoders can be installed under normal factory conditions as they can tolerate moderate misalignments between the shaft and the measurement module.
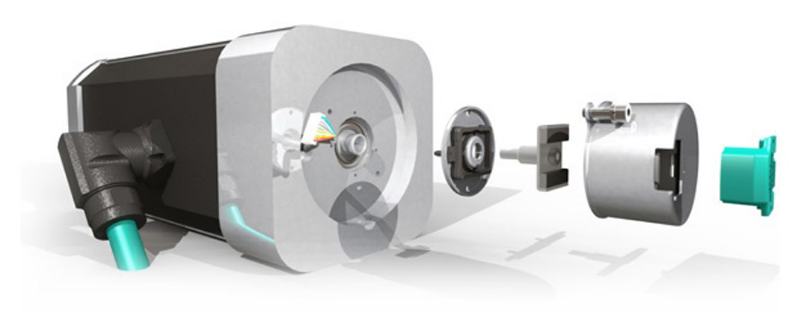
Further, magnetic encoders are available with multiturn measurement capabilities, with rotation counters powered by Wiegand energy harvesting technology. This elegant solution eliminates the need for backup batteries, or the complex system of code disks often used in multiturn optical encoders. Hollow-shaft kit encoders: The kit encoders described above are often mounted on the back or nondrive end of the motor (see Figures 2 and 3). In some cases, it can be useful to position the rotation measuring elements at the drive end of a motor. Hollow-shaft encoders, which feature a large central opening, can be installed around the drive shaft or in other positions in the drive train.
This can be advantageous when the drive system includes torque-amplifying reduction gears. Mounting a hollow-shaft encoder at the output end of a drive assembly will avoid positioning errors caused by backlash in the gear train. 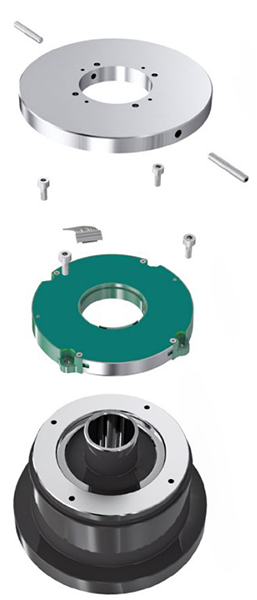 Bearing-less encoders: are a relatively new concept.
Bearing-less encoders: are a relatively new concept.
These retain the robust housing of standalone encoders, but with the rotating part of the measurement system (e.g., a permanent magnet for magnetic encoders) attached directly to the shaft of the host machine. This arrangement eliminates the bearings and shaft seals of conventional stand-alone encoders, saving space and reducing costs. The outer shell protects measurement elements from physical damage.
Communications interfaces
Standalone encoders are available with a wide range of communications interface options, ranging from analog and digital point-to-point connections, through fieldbus solutions, and on to industrial Ethernet systems. This makes it possible to integrate these devices into a wide variety of control systems, from simple one-axis motion controls to complex multi-parameter manufacturing automation systems. Encoders with advanced communications interfaces may also feature self-diagnostic capabilities that simplify maintenance and troubleshooting. Integrated motor control systems (servomotors, feedbackcontrolled stepper motors) often require real-time controls.
For this reason, these systems usually use point-to-point (motor-to-controller) wiring layouts that avoid the latency delays that can occur in fieldbus or Ethernet systems where communications channels are shared by multiple devices. Several proprietary communications protocols are available, but for many users, the open-source SSI and BiSS protocol suites provide a reliable and cost-efficient solution. SSI (Serial Synchronous Interface) and BiSS (Bidirectional Serial Synchronous) are digital interfaces that can support direct communications between motors and PLCs or other controllers. SSI connections offer good speed (clock rates up to 2 MHz), high resolution, flexible cabling, and reliable communication up to a few hundred meters (although baud rates are reduced for longer distances).
SSI protocols provide basic error detection (broken wire, short circuit, data consistency). BiSS is an advanced version of SSI that supports real-time communications between control devices and sensors/actuators in servomotors, robots, and other automation systems. The interface also enables the controller to set operational parameters in slave devices. There are several BiSS variants, including BiSS C (continuous communications) and BiSS Line (designed for configurations that combine power delivery and data transmission in a single cable). Open-source SSI and BiSS interface standards are nonproprietary, with no-cost licences.
SSI and BiSS communications use point-to-point connections, typically RS-422. Several devices can be daisy-chained together for more efficient cable layouts. This article was originally published in the Automation 2021: Control Systems Ebook.